

PRODUCTS
PRODUCTS

Software Motion Control
WMX (Soft Motion)
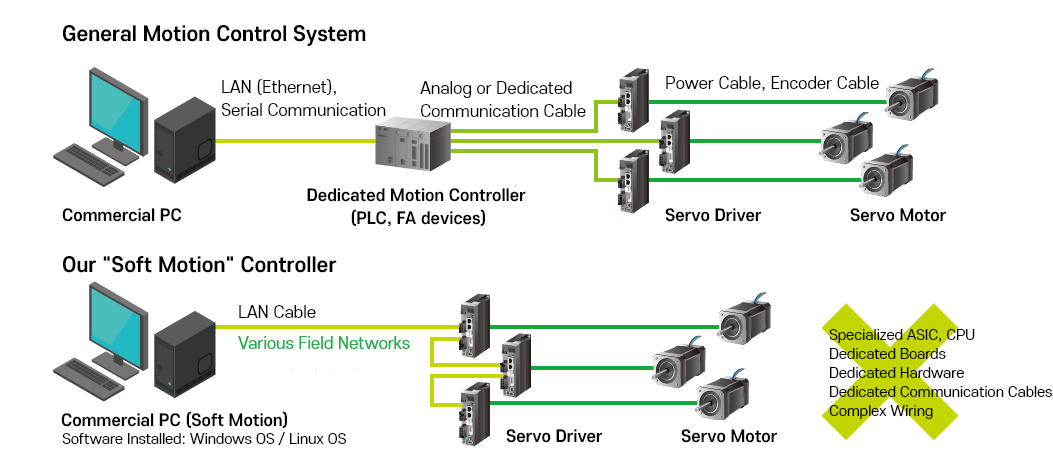
WMX is a software-based motion control solution developed using Movensys’ unique Soft Motion technology.

Powered by Movensys’ proprietary Soft Motion technology, WMX enables motion control of equipment on standard Windows PCs using software alone.
It helps replacing traditional motion controller boards by reducing complex cablings of legacy hardware based
systems. Motion control from a single PC simplifies overall system overhead,
and customers can customize real-time control threads according to their requirements for high
speed and accuracy.
Features
- Based on a real-time operating system, it ensures periodic and real-time control by occupying one or more cores of a multicore CPU.
- Open Architecture enables users to develop additional functions that they need, beyond the basic motion functions included in WMX.
- Easy for users to develop the desired functionality using general programming languages such as C, C++, C#, VB, and Python.
- Obtained the highest level of EtherCAT Master Class, Class A standard.
- Supports communication protocols including EtherCAT, CC-Link IE TSN, MECHATROLINK-4 and while simultaneously enabling hybrid control.
Option
-
▧ License:
Windows, Standard, Advanced
-
▧ Operating system environment:
-
Windows + Real-time OS RTX64
Control of 128 axes (1ms) to 16 axes (125μs) -
Windows OS (Non Real-time)
EtherCAT (128 axes, 8ms)
Simulation (128 axes, 1~8ms)
-
Windows + Real-time OS RTX64
-
▧ Communication:
EtherCAT, CC-Link IE TSN, MECHATROLINK-4 (Hybrid communication available)
Features by License
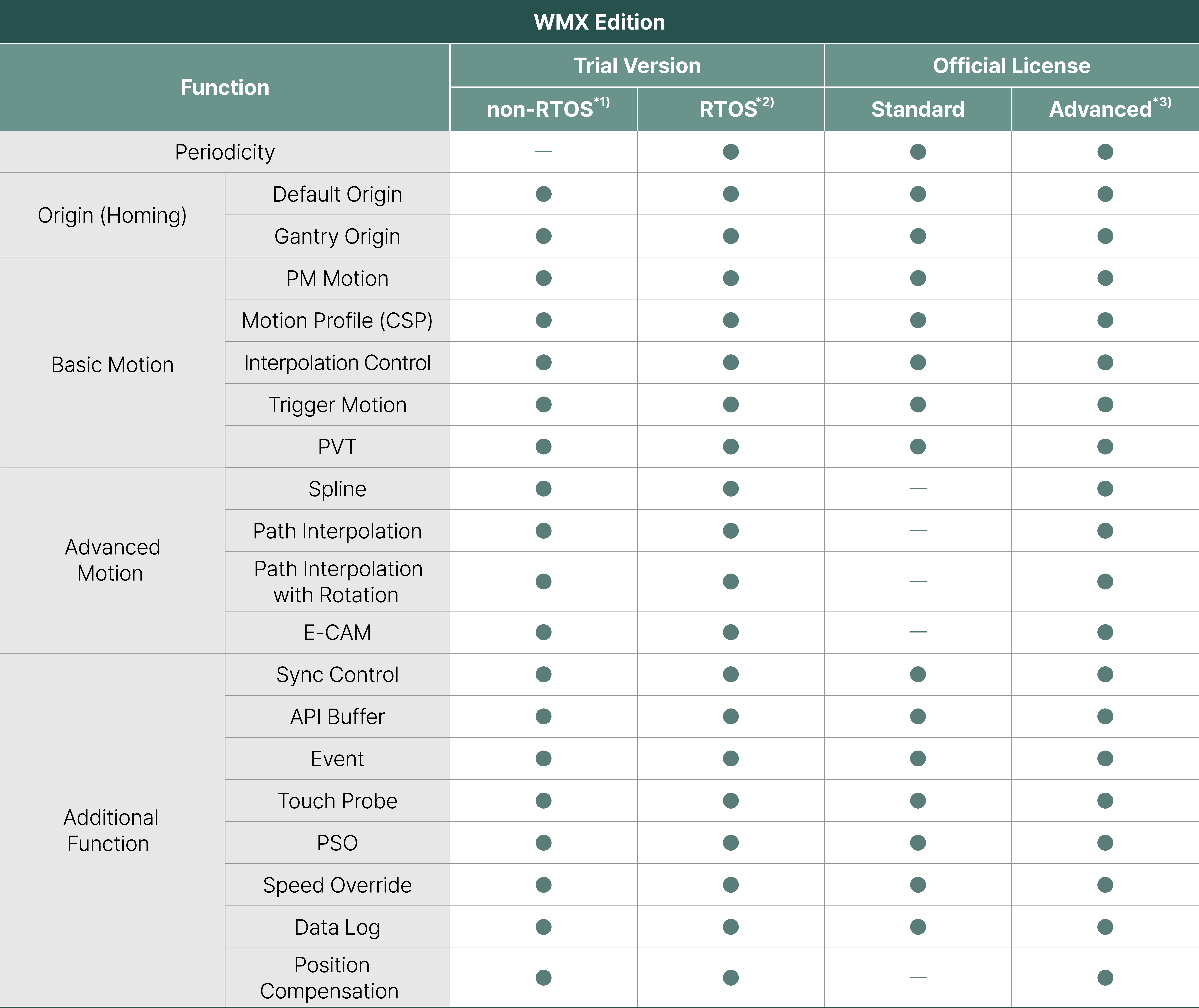
*1) non-RTOS version allows continuous communication in 1 hour increments without a license. And, API testing is possible in simulation mode without any functional limitations.
*2) RTOS trial versions can be used for up to 3 months.
*3) WMX3 options such as AVX, SCARA, and 6-DOF features are only available with the advanced license.
Detailed Specifications
Product Specifications
-
The Number of Control Axis
4~128 Axes ㅣ Up to 64 sets for synchronous and interpolation control
-
I/O
64,000 inputs ㅣ 64,000 outputs ㅣ Total 15.625KB
-
Communication / Command Cycle
31.25μs ~ 8ms ※Depends on CPU performance and communication platform
-
Maximum Number of Nodes
256
-
Communication Platform
EtherCAT | CC-Link IE TSN | MECHATROLINK-4
-
Communication Connection Method
Line | Ring | Star | Hybrid Communication
-
Development Language
C | C++ | C# | VB | Python
PC Recommended Specifications
-
CPU
Intel 8th Gen or higher recommended, i3, i5, i7, Xeon
-
Operating System
Windows 10 IoT Enterprise LTSC recommended
-
Version
Windows 10 1809 or higher
-
Supported Network Card
Support Intel NIC
-
RAM
8GB or more
Applications
View related news
Semiconductor
Front/Back-end Process (Photo, Etching, Wet/Dry Cleaner, Inspection)
Wafer Transfer Robot
Stocker/OHT/AMR
01

-
01
Semiconductor
-
02
Display
-
03
Smart Device
-
04
Secondary Cell (EV Battery)
Core Technology – Soft Motion Technology
Movensys’ Soft Motion technology is composed of a communication-optimized Soft Master, real-time modular synchronization, and dynamic channel management technologies. Through a highly optimized modular and open architecture (patented by Movensys), Soft Motion offers broad compatibility with various software platforms and networks.
-
▧ Stable real-time implementation
- Maintain to regularity by storing the control commands of windows in each memory channel and buffer and transmitting the commands according to the cycle
- Possible to fast and accurate control calculation through the same control signal and language regardless of network
- Possible to stable control by automatically updated at precise intervals on the real-time OS
- Freedom to configure the sequence by setting the cycle you want
-
▧ Multi-network
- Possible to various network matching only by changing the interface since the control module and the communication module are separated
- Utilize hybrid network by defining two or more communication protocols within the interface
-
▧ Program extensibility
- Possible to optimal linkage with 3rd party programs other than motion control programs
- Possible to develop and customize your own sequence by providing API library
-
▧ Device reliability and scalability
- Possible to create and add a separate control device besides general motion
- Maintain optimal system resources by automatically creating a status monitoring management unit for each device
-
Minimize conflicts between devices by using individual memory and buffers in each device
* Device: an element or handler that can perform a control operation; Utility
-
▧ High compatibility with hardware
- Compatible with various slave H/W considering only communication protocol
- Maximize hardware scalability when using multi-network
Do you need to inquire?
-
 Trial License Version
You can try the free demo OS before purchasing WMX.
Trial License Version
You can try the free demo OS before purchasing WMX.
-
 Check Where to Buy
You can check the distributors
Check Where to Buy
You can check the distributors
where you can buy WMX. -
 Tech Support
If you have any questions about WMX and Movensys hardware products, you can contact us through our website.
Tech Support
If you have any questions about WMX and Movensys hardware products, you can contact us through our website.
-
 Contact Sales Team
If you send your inquiries by e-mail,
Contact Sales Team
If you send your inquiries by e-mail,
the person in charge will contact you individually after checking.
Upcoming Product
SDMC
(Software Defined Motion Controller)A next-generation, cloud-based soft motion solution for factory-wide optimization beyond individual equipment